Drone Movement Controllers
Fly Mode
-
Ascend / Lift-off
-
Descend
-
Forward
-
Backward
-
Turn Left
-
Turn Right
-
Land
-
Water Land
Sail Mode
-
Lift-off
-
Forward
-
Backward
-
Turn Left
-
Turn Right
Claw Movement Controllers
-
Extend
-
Retract
-
Open
-
Close
-
Store


Cave Exploration Drone – UX Navigation System
A UX project for an amphibious drone designed for cave exploration. The focus is on creating a clear, intuitive user experience that supports researchers in navigating and operating the drone efficiently in complex and extreme environments.
Project Goals
The project focuses on designing the main control screens for operating an amphibious drone used in cave research. The goal was to create a touch-based control system that emphasizes usability for a non-expert user in a demanding, high-risk environment.
User
Target User: Young Researcher
A female researcher, aged 25–32, likely in the final stages of her advanced degree. She demonstrates strong academic skills, quick comprehension, and is highly fluent in English. While her interest in technology is moderate typically focused on social apps and basic office tools—her field of study equips her with the discipline and focus required for complex tasks. The drone control system must accommodate her ability to learn quickly while remaining intuitive and accessible for users with only basic to intermediate tech familiarity.

The Cave Area
The drone will be operated in an outdoor cave environment, exposed to natural elements such as rain, heat, and dust. There is no dedicated workstation, users are expected to work while sitting on the ground or standing on uneven terrain. Depending on the cave’s complexity and the number of required samples, the operation may extend over a long period.

Reinforced Tablet
The system runs on a rugged, heavy-duty tablet, designed to be held with both hands. Given the form factor, the user is expected to grip the tablet from the sides and operate it primarily with their thumbs. The tablet serves a dual purpose: displaying the drone’s live camera feed and providing full control over its operation. As the device relies entirely on touchscreen input, environmental conditions (such as rain, dust, and sunlight) and the user’s outdoor clothing may affect touch responsiveness.

-
Flight: Vertical (up/down), horizontal (forward/backward), and axis rotation (left/right).
-
Amphibious Functionality: Can land on and take off from water surfaces.
-
Sailing Mode: Forward/backward movement and axis rotation on water.
-
Sample Collection: Equipped with a front-mounted robotic claw capable of extending up to 30cm for material sampling.
-
Camera: Integrated front-facing camera with night vision capability.
-
Operating Time: Up to 45 minutes per session.
-
Proximity Sensors: 360° obstacle detection alerts for collision prevention.
-
Location & Tracking: Real-time positioning with indoor/outdoor tracking, map-based location display, and autonomous "return home" along the current route

Planning Phase
Takes place in a controlled indoor environment (office or lab) with minimal interaction with the drone or tablet. Focus is on mapping the cave, planning navigation routes, and marking sampling locations. Once finalized, the route and target points are uploaded to the tablet for use in the field.
On-Site Operation

The on-site operation is done using the tablet as the view-port and controller. All Drone operation controls will be done using an on screen indicators. Map will be available during the process as a navigation tool.
Drone information will also be displayed and available at all time; battery percentage | cargo load | air / water controller | claw deployment and controls | lights switch | night vision switch.
-
The user will hold the tablet with both hands using a full grip due to its weight and thickness. As a result, most interactions will be performed using the thumbs only.
-
To accommodate this grip style, primary navigation controls and main functions are positioned centrally along the tablet’s edges, with the most frequently used actions placed closer to the center for easier reach.
-
Outdoor usage presents several challenges for touchscreen interaction:
-
Rain can reduce touch responsiveness.
-
Heat may cause sweaty fingers.
-
Cold weather requires gloves, which impacts dexterity and touch accuracy.
-
-
To mitigate these issues, the interface uses large buttons with ample spacing to minimize accidental taps.
-
A physical “Home” button is centrally located at the bottom of the tablet, providing a reliable, failsafe way to return to the main screen.
-
Touch sensitivity is designed to be forgiving, especially on navigation controls, to accommodate environmental factors.
-
The drone operates in multiple states—fly, sail, and claw—with distinct control modes.
-
The interface clearly identifies and communicates the drone’s current state and adjusts the controller layout accordingly.
-
Claw control remains always accessible, featuring a split operation: controlling claw movement along the Z-axis while simultaneously managing drone movement on the X and Y axes.
Drone Screen – Main System Interface
View Port
-
Live Drone Camera Feed
-
Information Bar Includes:
-
Battery Level
-
Remaining Operating Time
-
Payload / Load Indicator
-
Compass
-
Map / Navigation View
-
Proximity Alerts
-
General Controls:
-
Lights On/Off
-
Night Vision On/Off
Physical Buttons:
-
Settings
-
Return Home
-
Maps

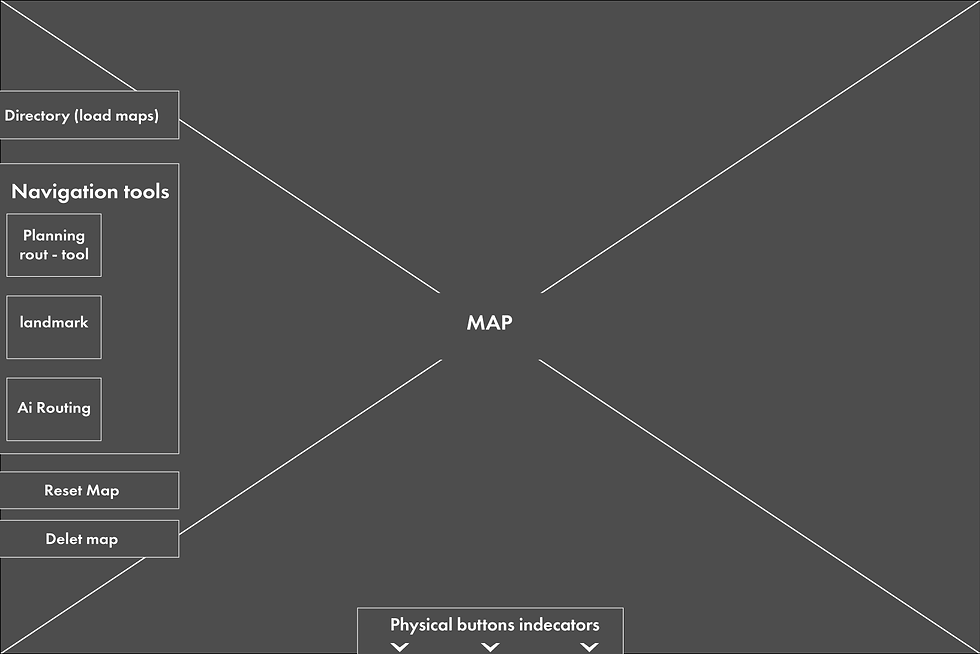
Map Screen
Actions:
-
Load a Map
-
Plan a Route (Routing)
-
Set Landmarks (e.g., Sample Collection Zones)
-
Reset Map
-
AI-Based Routing
Information:
-
List of All Available Maps
Physical Buttons:
-
Settings
-
Return Home
-
Maps (Save & Close)
Settings Screen
Configuration Options:
-
Tablet Settings
-
Drone Settings
-
Map Settings
Physical Buttons:
-
Settings (Save & Close)
-
Return Home
-
Maps




Controller Replacement Consideration
Given the drone’s use in outdoor environments—often exposed to rain, wind, heat, and cold—a professional-grade physical controller may provide a more reliable and ergonomic alternative to touchscreen-only interaction.
The existing system already includes multiple complex control layers (flight, sail, and claw modes), making touch navigation potentially error-prone in adverse conditions. To enhance precision and user confidence, an adaptive solution inspired by established standards in drone racing or cinematic drone control could be implemented.
These professional controllers offer:
-
Tactile feedback for more accurate input.
-
High responsiveness unaffected by weather conditions.
-
Physical joysticks and switches, allowing better control of multi-axis operations like flight and claw manipulation simultaneously.
Such a controller could either replace or complement the tablet interface, offering users flexibility based on mission complexity and environmental conditions.


Water Detection & Mode Automation
To improve usability and reduce manual input, the system could benefit from automatic detection of landing surfaces, allowing the drone to intelligently switch between flight and sail modes based on context.
Feature Concept:
The drone automatically detects when it has landed on water or solid ground using onboard sensors (e.g., pressure, proximity, accelerometer data, or water-contact sensors).
Upon detection:
If landing on water → Switch to Sail Mode
If landing on land → Switch to Standby or Ground Mode
This seamless transition would reduce user burden and prevent mode mismatches that could result in control errors or mission delays.
Benefits:
Enhances user experience by simplifying interaction.
Reduces cognitive load and chance of operator error.
Allows users to focus on mission-critical tasks like navigation, sample collection, or monitoring.
Optional Override:
A manual override should be available in case the user needs to maintain control over mode switching in unique scenarios.
Cloud-Based Map Integration
To streamline mission planning and enhance usability, a companion desktop application is recommended for map planning, route creation, and landmark management. Desktop environments offer more screen real estate, greater precision, and an improved user interface for complex tasks compared to the tablet.
Feature Concept:
-
Users can plan routes, define collection zones, and manage maps using a desktop app with a more intuitive and detailed interface.
-
All maps and routing data are saved to a cloud service.
-
The tablet app automatically syncs with the cloud, allowing field operators to access, view, or modify any pre-planned map seamlessly.
Benefits:
-
Simplifies pre-mission preparation.
-
Supports collaboration between office-based planners and field operators.
-
Ensures data consistency across devices and team members.
-
Enables real-time updates and mission adjustments if needed.
Considerations:
-
Requires stable connectivity for cloud syncing.
-
Should include version control and offline access to previously synced maps for field reliability.
